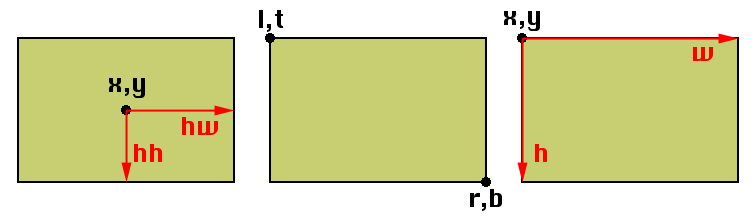
Box (center point with half-width and half-height extents)
One way to represent rectangles is as a center point (x, y) with half-width and half-height extents (hw, hh).
This is very useful when programming games, because it's generally easier to work with the centers of collisions shapes.
Also, it's easier to include rotation or other transformations to the rectangle when its origin is at the center.
AABB (left, top, right, bottom)
A second implementation treats rectangles as four numbers (l, t, r, b) where
(l, t) is the top-left corner and (r, b) is the bottom-right corner.
Rect (top-left point with width and height dimensions)
The last example represent rectangles as a top-left corner point (x, y) with width and height dimensions (w, h).
function pointOnSegment(px, py, x1, y1, x2, y2)
local cx, cy = px - x1, py - y1
local dx, dy = x2 - x1, y2 - y1
local d = (dx*dx + dy*dy)
if d == 0 then
return x1, y1
end
local u = (cx*dx + cy*dy)/d
if u < 0 then
u = 0
elseif u > 1 then
u = 1
end
return x1 + u*dx, y1 + u*dy
end
function pointOnCircle(px, py, cx, cy, r)
local dx, dy = px - cx, py - cy
local d = math.sqrt(dx*dx + dy*dy)
if d <= r then
return px, py
end
return dx/d*r + cx, dy/d*r + cy
end
function pointOnBox(px, py, x, y, hw, hh)
local qx, qy = px - x, py - y
if qx > hw then
qx = hw
elseif qx < -hw then
qx = -hw
end
if qy > hh then
qy = hh
elseif qy < -hh then
qy = -hh
end
return qx + x, qy + y
end
local function dot(ax, ay, bx, by)
return ax*bx + ay*by
end
function pointOnTriangle(px, py, ax, ay, bx, by, cx, cy)
local abx, aby = bx - ax, by - ay
local acx, acy = cx - ax, cy - ay
local apx, apy = px - ax, py - ay
-- vertex region outside a
local d1 = dot(abx, aby, apx, apy)
local d2 = dot(acx, acy, apx, apy)
if d1 <= 0 and d2 <= 0 then
return ax, ay
end
-- vertex region outside b
local bpx, bpy = px - bx, py - by
local d3 = dot(abx, aby, bpx, bpy)
local d4 = dot(acx, acy, bpx, bpy)
if d3 >= 0 and d4 <= d3 then
return bx, by
end
-- edge region ab
if d1 >= 0 and d3 <= 0 and d1*d4 - d3*d2 <= 0 then
local v = d1/(d1 - d3)
return ax + abx*v, ay + aby*v
end
-- vertex region outside c
local cpx, cpy = px - cx, py - cy
local d5 = dot(abx, aby, cpx, cpy)
local d6 = dot(acx, acy, cpx, cpy)
if d6 >= 0 and d5 <= d6 then
return cx, cy
end
-- edge region ac
if d2 >= 0 and d6 <= 0 and d5*d2 - d1*d6 <= 0 then
local w = d2/(d2 - d6)
return ax + acx*w, ay + acy*w
end
-- edge region bc
if d3*d6 - d5*d4 <= 0 then
local d43 = d4 - d3
local d56 = d5 - d6
if d43 >= 0 and d56 >= 0 then
local w = d43/(d43 + d56)
return bx + (cx - bx)*w, by + (cy - by)*w
end
end
-- inside face region
return px, py
end
function pointInCircle(px, py, cx, cy, r) local dx, dy = px - cx, py - cy return dx*dx + dy*dy <= r*r end
function pointInBox(px, py, x, y, hw, hh)
if math.abs(px - x) > hw then
return false
end
if math.abs(py - y) > hh then
return false
end
return true
end
function pointInTriangle(px, py, x1, y1, x2, y2, x3, y3)
local ax, ay = x1 - px, y1 - py
local bx, by = x2 - px, y2 - py
local cx, cy = x3 - px, y3 - py
local sab = ax*by - ay*bx < 0
if sab ~= (bx*cy - by*cx < 0) then
return false
end
return sab == (cx*ay - cy*ax < 0)
end
function segmentVsSegment(x1, y1, x2, y2, x3, y3, x4, y4)
local dx1, dy1 = x2 - x1, y2 - y1
local dx2, dy2 = x4 - x3, y4 - y3
local dx3, dy3 = x1 - x3, y1 - y3
local d = dx1*dy2 - dy1*dx2
if d == 0 then
return false
end
local t1 = (dx2*dy3 - dy2*dx3)/d
if t1 < 0 or t1 > 1 then
return false
end
local t2 = (dx1*dy3 - dy1*dx3)/d
if t2 < 0 or t2 > 1 then
return false
end
-- point of intersection
return true, x1 + t1*dx1, y1 + t1*dy1
end
local function segmentVsCircle(x1, y1, x2, y2, cx, cy, cr) local qx, qy = pointOnSegment(cx, cy, x1, y1, x2, y2) return pointInCircle(qx, qy, cx, cy, cr) endExpanded version that finds the points of intersection:
function segmentVsCircle(x1, y1, x2, y2, cx, cy, cr)
-- normalize segment
local dx, dy = x2 - x1, y2 - y1
local d = math.sqrt(dx*dx + dy*dy)
if d == 0 then
return false
end
local nx, ny = dx/d, dy/d
local mx, my = x1 - cx, y1 - cy
local b = mx*nx + my*ny
local c = mx*mx + my*my - cr*cr
if c > 0 and b > 0 then
return false
end
local discr = b*b - c
if discr < 0 then
return false
end
discr = math.sqrt(discr)
local tmin = math.max(-b - discr, 0)
if tmin > d then
return false
end
local tmax = math.min(discr - b, d)
-- points of intersection
-- first point
local qx, qy = x1 + tmin*nx, y1 + tmin*ny
if tmax == tmin then
return true, qx, qy
end
-- second point
return true, qx, qy, x1 + tmax*nx, y1 + tmax*ny
end
function segmentVsAABB(x1, y1, x2, y2, l, t, r, b)
-- normalize segment
local dx, dy = x2 - x1, y2 - y1
local d = math.sqrt(dx*dx + dy*dy)
if d == 0 then
return false
end
local nx, ny = dx/d, dy/d
-- minimum and maximum intersection values
local tmin, tmax = 0, d
-- x-axis check
if nx == 0 then
if x1 < l or x1 > r then
return false
end
else
local t1, t2 = (l - x1)/nx, (r - x1)/nx
if t1 > t2 then
t1, t2 = t2, t1
end
tmin = math.max(tmin, t1)
tmax = math.min(tmax, t2)
if tmin > tmax then
return false
end
end
-- y-axis check
if ny == 0 then
if y1 < t or y1 > b then
return false
end
else
local t1, t2 = (t - y1)/ny, (b - y1)/ny
if t1 > t2 then
t1, t2 = t2, t1
end
tmin = math.max(tmin, t1)
tmax = math.min(tmax, t2)
if tmin > tmax then
return false
end
end
-- points of intersection
-- one point
local qx, qy = x1 + nx*tmin, y1 + ny*tmin
if tmin == tmax then
return true, qx, qy
end
-- two points
return true, qx, qy, x1 + nx*tmax, y1 + ny*tmax
end
function circleVsCircle(cx, cy, r, cx2, cy2, r2) return pointInCircle(cx, cy, cx2, cy2, r + r2) endExpanded version:
function circleVsCircle(cx, cy, r, cx2, cy2, r2) local sradii = r + r2 local dx, dy = px - cx, py - cy return dx*dx + dy*dy <= sradii*sradii end
function circleVsBox(cx, cy, cr, x, y, hw, hh) local qx, qy = pointOnBox(cx, cy, x, y, hw, hh) return pointInCircle(qx, qy, cx, cy, cr) endExpanded version:
function circleVsBox(cx, cy, cr, x, y, hw, hh) local dx = math.abs(x - cx) local dy = math.abs(y - cy) dx = math.max(dx - hw, 0) dy = math.max(dy - hh, 0) return dx*dx + dy*dy <= cr*cr end
function triangleVsCircle(ax, ay, bx, by, cx, cy, sx, sy, r) local qx, qy = pointOnTriangle(sx, sy, ax, ay, bx, by, cx, cy) return pointInCircle(qx, qy, sx, sy, r) end
function boxVsBox(x, y, hw, hh, x2, y2, hw2, hh2)
if math.abs(x - x2) > hw + hw2 then
return false
end
if math.abs(y - y2) > hh + hh2 then
return false
end
return true
end
local function cross2(x1,y1,x2,y2,x3,y3, ax,ay,bx,by,cx,cy) {
local dXa, dYa = ax - x3, ay - y3
local dXb, dYb = bx - x3, by - y3
local dXc, dYc = cx - x3, cy - y3
local x32, y23 = x3 - x2, y2 - y3
local x13, y13 = x1 - x3, y1 - y3
local D = y23*x13 + x32*y13
local sa = y23*dXa + x32*dYa
local sb = y23*dXb + x32*dYb
local sc = y23*dXc + x32*dYc
if D < 0 then
if sa >= 0 and sb >= 0 and sc >= 0 then
return true
end
local ta = x13*dYa - y13*dXa
local tb = x13*dYb - y13*dXb
local tc = x13*dYc - y13*dXc
return (ta >= 0 and tb >= 0 and tc >= 0)
or (sa+ta <= D and sb+tb <= D and sc+tc <= D))
else
if sa <= 0 and sb <= 0 and sc <= 0 then
return true
end
local ta = x13*dYa - y13*dXa
local tb = x13*dYb - y13*dXb
local tc = x13*dYc - y13*dXc
return (ta <= 0 and tb <= 0 and tc <= 0)
or (sa+ta >= D and sb+tb >= D and sc+tc >= D)
end
end
function triangleVsTriangle(x1,y1,x2,y2,x3,y3, ax,ay,bx,by,cx,cy)
return not (cross2(x1,y1,x2,y2,x3,y3, ax,ay,bx,by,cx,cy) or
cross2(ax,ay,bx,by,cx,cy, x1,y1,x2,y2,x3,y3))
end